Week 0
- A reference to all symbols necessary for the notes Linear Algebra Symbols
- A list of Problems associated with the Notes 471-ProblemList
- A series of unanswered questions about Linear Algebra 471-QuestionBank
- References to Category theory Category Theory For Babies Category Theory
- Tikz Testing Ground 471-ImagesTest 6) 471-Homework
Coordinate Maps
Given a Vector Space V over F, and a basis , a coordinate map is the following isomorphism:
Where
Week 1
Lecture 1 : Systems of Equations
Solution Space
Given a field F, and a system of m equations and n variables,
A solution space is the set of all n-tuple such that it solves all of the equations. Can be either of the three cases
- The system is not solvable Then there are no solutions to the system,
- The system is solvable Then there are either 1 or infinitely many solutions (cannot have any other finite number of solutions other than 1, think about lines intersecting)
Back Substitution
A method of solving a system of equations where the equations are shaped like a triangle, with no 0’s on the diagonals!
Example
, OR WE GET DIVISION BY ZERO!
We assume that
Unique Solution
Unique solution
Infinitely Many Solutions
Note, this system has Infinitely many solutions! Hence, we can form a solution space , where
Symbolic representation of systems of linear equations
We can represent any system in the following way :
Lecture 2 : E.R.O and Equivalent Systems
Elementary Row Operations (ERO)
Operations that can be done on any system with the following properties
- Scalar Multiplication : : multiply the ith equation by a, where
- Addition : replace the jth equation with jth equation + a ith equation,
- Permutation : : Swap ith and jth equation
Row equivalent
We call 2 systems row equivalent if one is obtained from another by a sequence of elementary row operations
Theorem 1.1 Equivalent Systems of Equations
Two systems, and are equivalent they have the same solution space
Theorem 1.2 : Row Equivalence Equivalent Systems
Proof and that are tow equivalent, then
- produces equivalent systems Suppose we have two systems, and that have the same solution with the following condition : Apply the operation on the system, then
You must prove it for each individual operation
Corollary 1.3 : Homogenous row Equivalent Systems and be two two row equivalent matrices, then they exactly have the same solution!
Example
Theorem 1.2 Solutions to Equivalent homogenous systems
Row-Reduced Echelon Form (RREF)
A system of linear equations is in RREF if it follows the follow requirements
- The first non-zero entry in each row is equal to 1
- Each column of the system contaisn the leading non-zro entry for some row has all its other entries 0
Lecture 3 :
- Added Example to RREF example
Week 2
Lecture 4 :
Week 8
Lecture 20
Theorem :
Theorem
Given a basis ,a linear map
is the same thing as an n-tuple of vectors Namely
- Given , define an n-tuple as :
- Conversely, given , define by declaring that
- This allows us to uniquely define a linear transformation such that
To be even more explicit, we can define W with a basis of
Examples
- Polynomials of fixed degrees : Describing their Transformations Lets choose a standard basis for to be . Then we could choose a triple . Using Threom 0.0.0., the transformation is defined by the following
Definition :
To denote the matrix of relative to the ordered Bases is
Where number of rows and number of columns is
Note
Or each basis vector as :
Exercises
Rotations on Lets denote the rotations on as the following transformation
and the Standard Basis , then
Therefore, the Matrix for rotations on the cartesian plane is :
We used the following properties(which we will prove later!) :
Lets denote the standard basis to each vector space respectively. Then
Write the matrix for the following transformation
Lecture 21
- Write somewhere
- Let with the standard basis. Then we can express we can express this in terms of coordinate vectors such that
- Here is a better example : Let be the basis, hence we can express polynomials which gives us bijections between vector spaces!
Lemma : Coordinate Vectors in Linear Transformations
If , then
Proof
Remark : This is basically multiplying a matrix with a Vector! , a vector , then we produce a vector , where the ith component is
Lets examine a matrix
The Motivation? MATRIX MULTIPICATION
Theorem : Matrix Multiplication
Let be vector spaces with bases , and a be a linear map, then
If we define , then
Digression : The Algebra of Linear Transformations
Groups, Rings, Fields, VectorSpaces
(Prop) Fun is a F.V.S. (The Soul Stone of Linear Algebra!)
Consider a set and a F.V.S. , then all possible functions from (denoted or in set theory ) is a F.V.S
Proof and an arbitrary element then we have to show that it is an abelian group under addition that respects scalar multiplication!
- Abelian Group under Addition
- Respects scalar multiplication
Since is an arbitrary scalar, and , then Therefore, it follows all of the vector space axioms, hence is a vector space!
Why isn't an F.V.S.
Why is this the so powerful
Think about endgame, the soul stone is able to take any soul and put it into any other soul, in this case, we can take the soul of the set and transform it into an FVS(Given that its being mapped into an FVS)! This powerful took is the backbone to why matrices work!
Homomorphisms and using the Soul Stone
- While the soul stone is quite unstable, we can make it more stable through homomorphism!
Homomorphism :
Homomorphism is a function in mathematics that preserves the structure between two algebraic structures. In our case, if we want to go between two FVS, say V and W, we want to define a vector space homomorphism over the same field to preserve the vector space properties!
Supose was an FVS, we will call it V, what do we get out of it?
- From the prop, we can easily examine that is a vector space
- These mappings are also Vector Space Homomorphisms over the same field F
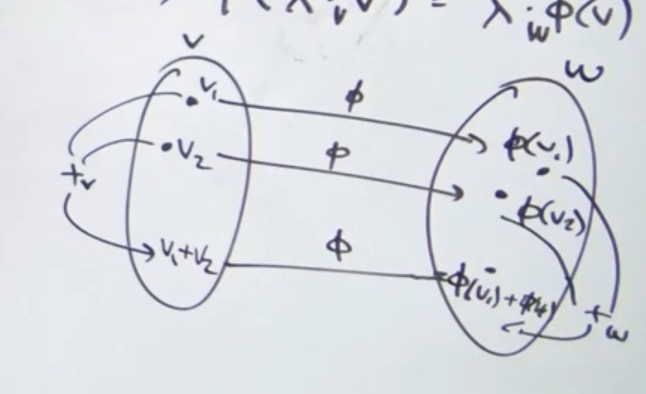
(prop) Linearity is a Vector Space Homomorphism
For any vector spaces over the same field , a function such that , is a vector homomorphism( samething as saying that is linear) if for any :
Visual :
Side note on linearity/linear maps
- Linear Algebra is an old subject, with its strongest roots dating back to the 19th century. Therefore a lot of Jargon has stuck with it until the 21st century. Using the concept of linearity(19th century Jargon) is the same ideas as a Vector Space Homomorphism over the same field(Contemporary Jargon), however notice how cacophonous this is, so linear is just nice to use
- Note : This specific construction preserves the vector space structure, meaning that it satisfies all 10 axioms of a vector space!
- For the rest of the notes, I will also omit the sub and super scripts if we know before hand that its a the Homomorphism satisfies linearity (Also known as a Linear Transformation)
- We will transition to and to denote Linear Transformations between two vector spaces -Visual : > [!note] Linear maps:
Proof and . Then for any two vectors
The space of all linear maps
(prop) is a Vector Space
Lets consider the subset such that the functions are linear. then is a FVS
Proof (Simple) :D is a vectorspace, we must show it's a subspace. and we can show this through linearity!
- Linearity proves closure under addition
Let define addition, for any vector We will also denote this short-hand (T + S) is linear
Suppose we pick two vectors and , then
- Linearity proves closure under addition Let define addition, for any vector We also represent this operation as is linear
Suppose we pick vectors and scalars
Notation , as it provides more detail, is 19th century notation
I will denote
Function Compositions over Vector Spaces
Consider 3 vector spaces, and 2 functions and . We can apply the same Composition rules to vector spaces as it can be composed as
This naturally gives us the following map
Which can be restricted even further to :
[!note] Linearity and Bilinearity
Compositions of Linear Maps are linear!
Proof , then j This guarantees us the fact that [!warning] This implies Bi-linearity! Def : Bilinearity : Linear with respect to each of the two arguments Claim : is Bi-linear [!check]- Proof
Remark : This bilinearity of rings be a ring with two binary operations, then the distribution laws mean that multiplication is bilinear
There is some connection between the two!

Week 9
Lecture 22
- Definition of Bilineatiy
- Proved the Bilinearity
- Showed Bilinearity in rings
Associativity of composition
Let be sets, and lets define the following functions , then :
Proof
Remark , might not make sense. Take but note that
Arbitrary composition of functions do not allow it to form a ring since given any
The Algebra of Endomorphisms!
We denote the set of Endomorphisms , so
forms a Ring under and
We can define addition and multiplication in the following ways: We can define two special elements as well (I will note that the zero function is often denoted by the zero element in the ring, but I want to introduce this new notation for even more clarity. It follows a similar style to the Identity) Collecting all of these items, we can form into a ring! In particular, we can see that the distributes over . Take note that is not abelian as for some particular and
Exercise Orthogonal Reflections
Lets examine . One example of would be the orthogonal reflections on the cartesian plane. For example, consider a line on the plane. We can consider the following transformation.
Hence using geometry, we can define one of the basis vectors as a rotation of around the origin, hence:
Hence using geometry, we can define one of the basis vectors as a rotation of around the origin, hence:
Giving us the following matrix for orthogonal reflections over any line
Method 2 : Curtesy of Stack exchange (Requires Matrix multiplication which will be proven later) Lets denote the Reflection over the any line that is angle away from the x-axis to be . If we consider reflections over the x-axis () we get the following matrix
Now instead of considering rotations on a vector basis, suppose we rotate the line instead. Lets consider rotations by around the orgin. First we rotate our line and vector back towards the origin, then reflect along the x-axis, then rotate it back to our original angle!
Exercise : Composition of Reflections
Now Suppose we have two lines and consider that the angle from to is , then consider two vectors on each line, that lie on and respectively. Then
(by the same construction)
(2, 5, -3) = 2 + 5x -3x^2 = 2(1+x) + 5(1+x+x^2) -3(1+x+x^4) = 4 + 4x + 5x^2 -3x
sin((1, 0))
→ sin(-x) = -sin(x) → cos(-x) = cos(x) →cos(x - pi/2) = -sin(x)*sin(-pi/2) = sin(x) sin(x - pi/2) = cos(x)sin(-pi/2) = -cos(2x) →sin(x+pi/2) = cos(x) → cos(x + pi/2) = -sin(x) cos(-2\alpha + pi/2) = -sin(-2\alpha) = sin(2\alpha) sin(-2\alpha + pi/2) = cos(-2\alpha) = cos(2\alpha) goal = (sin(2x), -cos(2x))
its a clockwise rotation around (-pi/2 + 2\alpha)
pi/2 - alpha
is alpha is 30
then beta is 60
so the rotation would end up in being in -30
-30 = -90 + 2 * 30
Lecture 23
Matrix Multiplication
Matrix Multiplication Operation be an matrix and be an matrix, then where
Let
Matrix Multiplication Representation in terms of Linear Transformations with bases respectively with 2 linear transpositions, and , then
Suppose we have 3 vector spaces over a field F,
Proof
Rotations on Lets define the following function (Or more sophistically linear transformation) on the coordinate plane() as the following. Take any point, (x, y). We can define a rotation around the origin by an angle in the following way, where is the standard Basis Here is an example of this working, take the point (1, 1) for example and we want to rotate it by around the origin, we can think of it as just a standard "matrix multiplication"
R_{90 \degree}((1, 1)) = \begin{bmatrix} \cos(90 \degree) & -\sin(90 \degree)\\ \sin(90 \degree) & \cos(90 \degree) \end{bmatrix}\begin{bmatrix} 1 \\ 1 \end{bmatrix} = \begin{bmatrix} 0 & -1\\ 1 & 0 \end{bmatrix}\begin{bmatrix} 1 \\ 1 \end{bmatrix} = \begin{bmatrix} 0\cdot1 +0 \cdot-1 \\ -1\cdot1 + 0\cdot0 \end{bmatrix} = \begin{bmatrix} -1 \\ 1 \end{bmatrix}$$ Here is a visual of what we just did! ![[Pasted image 20240311114856.png|300]] # Big Proof Concept (Sum of Angles Formula!) - Rotation $a$ + Rotation $b$ = Rotation $a + b$, Hence you can conceptualize composition of these items as adding the rotation between the two angels. You apply rotation by angle $a$ 1st, then by angle $b$ second. This gives us that: $$R_{a} \circ R_{b} = R_{a + b} = R_{b + a}$$ This naturally gives us the following identity: $$[R_{a+b}]_B^B = [R_{a}]_B^B[R_b]_B^B$$ Giving us this beautiful result that $$[R_{a} \circ R_{b}]_B^B = [R_{a}]_B^B[R_b]_B^B$$ What does this tell us? It gives us a quick way to compute cos(a + b) and sin(a + b) as $$ \begin{aligned} \begin{bmatrix} \cos(a + b) & -\sin(a + b)\\ \sin(a + b) & \cos(a + b) \end{bmatrix} = \begin{bmatrix} \cos(a) & -\sin(a)\\ \sin(a) & \cos(a) \end{bmatrix} \begin{bmatrix} \cos(b) & -\sin(b)\\ \sin(b) & \cos(b) \end{bmatrix} \end{aligned} $$ Using the matrix multiplication techniques, we can easily see that $$ \begin{aligned} \cos(a + b) &= \cos(a)\cos(b) -\sin(a)\sin(b)\\ \sin(a + b) &= \sin(a)\cos(b) + \cos(a)\sin(b) \end{aligned} $$ # Extending this phenomenon Further $$\begin{aligned} \cos(2a) &= \cos(a)\cos(a) -\sin(a)\sin(a) = \cos^2(a) - \sin^2(a)\\ \sin(2a) &= \sin(a)\cos(a) - \cos(a)\sin(a) =2\sin(a)\cos(a) \end{aligned}$$ $$[R_{a + b + c}]_B^B = [R_a \circ R_b \circ R_c]_B^B = [R_{a}]_B^B[R_b]_B^B[R_{c}]_B^B$$\begin{aligned} [R_a]_B^B[R_b]_B^B[R_c]_B^B &= \begin{bmatrix} \cos(a) & -\sin(a)\ \sin(a) & \cos(a) \end{bmatrix}\begin{bmatrix} \cos(a) & -\sin(a)\ \sin(a) & \cos(a) \end{bmatrix}\begin{bmatrix} \cos(a) & -\sin(a)\ \sin(a) & \cos(a) \end{bmatrix}\ &=\begin{bmatrix} \cos(a) & -\sin(a)\ \sin(a) & \cos(a) \end{bmatrix}\begin{bmatrix} \cos(a)\cos(b) -\sin(a)\sin(b) & -\sin(a)\cos(b) + \cos(a)\sin(b)\ \sin(a)\cos(b) - \cos(a)\sin(b) & \cos(a)\cos(b) -\sin(a)\sin(b) \end{bmatrix} \end{aligned}
Commutative Diagrams
Lecture 24
Change Of Coordinates Formula
Suppose V is a Vector Space over F and we are given two bases
Given any vector , there naturally exists two coordinate vectors
These two coordinate vectors give natural rise to an identity transformation: Combining our previous ideas,
(Remember that !)
Commutative Diagram
Remark you find the coordinate vectors that is a solution to :
This is an easy computation as its all a system of linear equations. To find
Change of a Matrix of a linear map
Suppose and be two bases. From the precious theorem, then Characterized by Now choose another pair of bases, , which will give rise to :
How are and related?
Commutative diagram . This is what we get in general!
Insert Second COmm diagram
Change of basis Matrix
Let V be a vector space. If this set exists such that makes it a basis, then the matrix is called the change of basis matrix This is equivalent to saying to saying if is a basis, then Therefore, in order to changes bases, we need an n-tuple of vectors, meaning we need an matrix
Recall that Fact:
How do we find
Suppose we are given an old basis and a new basis such that , hence . Find either for some or for all
Solution is fixed, then its coordinates are a solution to Which means that You can notice that we get the following solution! Now suppose that is arbitrary, there are 2 equivalent answers, then with cant be specified. There are two ways to tackle this problem!
- This is where you need Indeed, as In order to find , we just solve an n system , where 1 is located in the jth component Hence, we just solve an augmented matrix p_{11} & ... & p_{1n} &1 & & 0\\ & \ddots & & & \ddots & \\ p_{n1} & & p_{nn} & 0 & & 1 \end{array}\right]$$ Solving will give us : $$\left[\begin{array}{c c c|c c c} 1 & & 0 & & & \\ & \ddots & & & * & \\ 0 & & 1 & & & \end{array}\right]$$ Where the $*$ is $P^{-1} = [Id]^B_{B'}$
Week 10
God damn this theory is fucked and all over the place
- Prove that has a basis of n elements where half of them are left inverses of the dual of V and half of them are the right inverses of the dual V
- maybe show that it is a direct product?
Lecture 25 : The Dual Vector Space or Matrix Transposition
Matrix Transpose
Given , we define its transpose
Example
\Cmatrix{}{1&2&3\\4&5&6}^\top = \Cmatrix{}{1&4\\2&5\\3&6}
What is the meaning of ?
Linear Functionals and Dual Spaces
Let be a vector space over , then its dual is defined to be
We call elements in linear functionals as a function Note : Dual Spaces are also denoted as but i don’t like that notation. Also the start is often reserved for the adjoint!
, then a function from can be defined as
The space of integrable functions over a closed domain! take a polynomial
(Cor 1) forms a vector space
Proof is a vector space, and is a vector space, then forms a vector space!
Using Prop (Lecture 22), since
(Cor 2) Basis of (Dual Basis) Let be a basis of V, then we can define the dual basis as a list of to be functions such that Then form a basis for Its all part of the Theory of Functions in Linear Algebra!
Standard basis of Let be the standard basis of , then is the dual basis for the standard basis of
Before looking at the proof, I recommend examining the next theorem to build intuition first!
Proof , then Therefore, Hence ever linear functional is just
Pick a
(Cor 3) Every Linear Functional has a left! (The anti-Dual Space ) Let be a linear functional.
- is injective:
Suppose , then . Then (since every element in a field has a multiplicative inverse)! By definition, we know that , meaning that the only element that maps to the additive inverse in is the 0 in , therefore the kernal is trivial or
- is surjective:
Pick an , , therefore
Therefore, every linear functional is invertible!. lets define its inverse as where and , given a dual space with a dual basis : , we have an ati-dual with an anti-dual basis : ,
(Cor 4) Basis of Suppose are bases. Using the props from before, we know that Since both of these are vector spaces, we know the dimension will be by a bunch of theorems we did earlier(and later). hence we have basis of dimensions and basis will conprise of elements :
(Thm) Dimension of
Extended Proof and , then we can find an n-tuple such that . So this mapping looks like this
- is linear Let and
- is invertible Injective. is the only function that maps and is also the zero in the vector space of Surjective : Let be the basis of and be the basis of , then using lecture 20, we can define and using the fact that is linear, then clearly the
- Since T is invertible, . We have proved that is an isomorphism!, hence meaning that .
- This proof is fascinating as it illustrates what the linear transformation does under the hood. Let Then
Proof Note: We really haven't built enough machinery to prove the complex components of this, plus its really uninspiring
- Added Fact : Groups, Rings, Fields, VectorSpaces that : Every field is a V.S., but not all V.S. are fields!
THE BEUAUTY OF THE DUAL
Given any linear transformation and their respective duals , the linear transformation is the composition pictured below!
(Lem) Matrices, Transpose, and Duals Oh My
Given a linear map, , it defines the map such that
- Note : Composition of functions is a bi-linear operation : F is linear and G is linear, therefore, is Linear
What is matrix
Suppose we have fixed bases and , hence , then the dual bases, and Recall that We obtain that , hence these matrices are just transposes of each other!
(Lem) Linear maps and their transpose
If , then
Proof BY the definition of a dual basis: Hence:
By definition
Lecture 26: Matrix Transpose Properties
(Prop)
Why the swap? Gives rise to They are the same map! so
Proof
The structure of a linear map
(Rank-Nullity Theorem)
Goal : Given a linear map , try to understand what it really does
19th century Interpretation
Given a linear map, , Let bet he change of bases matrices, w.r.t. A, then what is
Question:
- Find matrices P, Q, such that is as nice as possible
(Thm) Change of Basis Matrix
Given finite dimensional vector spaces, and a transformation , then there exists bases, such that , where
- Note : These bases are not unique, but any pair of such bases give the same matrix!
Week 12
- QUstion: Why does he reoder the matrix determinant differently. I am used to the notion of the matrix being ?
- FIX THIS HORENDOUS SHIT NOTATION WHEN ADDING MORE VECTOR SPACES
- “Mathematics is about thinking about theory, not so much about memorizing computation”
- “Some times mistakes happen, and saying sorry is okay. But sometimes its about how you fix the problem” - Pizza Guy
- Finish the proof for the direct sums
Lecture 31 : 4/1 : Bi-Linear Functionals!
Matrix? What is is? And what functions can be made using this?
Motivating example, Lets define the matrix: \Cmatrix{}{a_{11} & a_{12} \\ a_{21} & a_{22}} \in M_{2 \times 2}(F) Define This definition is a function! Note: This function is a polynomial in 4 variables!
Is this function Linear? , then can be considered linear. This is what is known as a bi-linear function!
NO: IT IS QUADRATIC, but it can be linear. Suppose we fix variables
End Goal : Construction of the determinant of the matrix!
Trick: Realize that the deteminant, up to proportionality, is just n-linear anti-symmetric functions that maps
Bilinear Functions!
https://kconrad.math.uconn.edu/blurbs/linmultialg/bilinearform.pdf This who approach is just taking another idea we already discovered! Given Vector spaces with bases , then the linear map is the same as the set of n-tuples such that Another example: has basis with dual WE COME BACK TO THE DELTA FUNCTIONS!
AN even further generalization
Bilinear Functionals
Let be vector spaces, and define a map . We say is BiLinear if linear respective to each argument when another is fixed ie. If is BiLinear, then we can express it as one summation : One take away is recall how distribution works, so the order of i and j can be different! 3
Distribution on Rings is a ring!, then the two distribution laws show that is bilinear!
If
A note on certain linear functionals:
The linear functionals we are going to examine in this next section will involve examining vectorspaces of the same dimension : n, so we will compress the notation even further below :
The set of all Bilinear Functionals Other sources may use
- is a FVS (Check lecture 18) Examine that is a vectorspace, then done!
What is the basis of
We know the basis of to be Lets denote the bases and dual bases as followed, : We can then determine a pair of bi-linear maps by the following: This function is quadratic!, namely : B(v_1, v_2) = \sum_{i, j} a_{1i}b_{2j} \sum_{k,l} B(v_{1i}, v_{2j})v^{\vee}_{1i}(v_{1k})v^{\vee}_{2j}(v_{2l})$$$$ = \sum_{i,j} B(v_{1i}, v_{2j})\overbrace{v^{\vee}_{1i}(v_{1k})}^{\delta_{ik}}\overbrace{v^{\vee}_{2j}(v_{2l})}^{\delta_{jl}} = B(v_{1k}, v_{2l}) 2) The monomial : is bilinear
- fix then is linear. Or fix , then is linear
- Therefore, spans
(Lem) are all linearly independent!
Proof , then , Therefore, all the L.D. relation is trivial!
Suppose
Therefore, the basis of consists of elements of the form : for all combinations of i and j
We know that hence we can define the usual
Consider the following Vector Space :
Cartesian Product of Vector Spaces
- Examples and Proof Provided by Axlers Book
Example Note the following:
Consider the following vector spaces
Given F.V.S.'s , then forms a F.V.S. Lets consider what this looks like as a set: Lets define the following operations :
Proof and scalars
- Closure under addition:
- Associativity
- Commutativity
- Identity
- Inverse
Pick any vector v, then
- Scalar Multiplication Closure
- Distribution Properties
(prop)
Proof denote the basis of vectorspace , where it contains vectors. Lets also denote to be the additive identity of vector space Claim : the basis of of can be split up based on the dimension of each vector space ex) cartesian product of 2 vector spaces:
(Lem 1) : Given a F.V.S. V, its additive identity, forms a subspace
Proof
- Closure under addition:
- Scalar multiplication:
- Additive Identity Exists:
Trivial by construction
Since its a subspace, and by prop…471-addbacklink, then is also a vectorspace!
(Lem 2) Given F.V.S. V, W, and are vector spaces with the same dimension as V
Proof is an isomorphism
By construction of the homomorphism, that is the only element that maps to 0.
The proof for the other direction is entirely the same,
Now, for every vector space , construct vector spaces of the same size by using the following cartesian product : be a vector space called . Claim:
- Trivial
- Trivial Therefore,
Fact
In an additive category, such as abelian groups and vector spaces over a field F, the cartesian product and the direct-sum are the same thing! https://math.stackexchange.com/questions/39895/the-direct-sum-oplus-versus-the-cartesian-product-times https://en.wikipedia.org/wiki/Biproduct https://en.wikipedia.org/wiki/Additive_category Using this fact, we will use the direct sum to denote cartesian products, just because it looks cleaner:
Clearing up the confusion
- The latter is just better notation
- The former is all linear maps, the latter is all bi-linear maps!
Tensor Product
Notation and Definition dump
We say something is linear when We say something is bi-linear when and We say something is tri-linear when We say something is ,multi-linear/Poly-Linear/N-Linear if
- Definition adapted from : https://www.math.lsu.edu/~lawson/Chapter9.pdf
BEST SLOGAN : “Tensor products of vector spaces are to Cartesian products of sets as direct sums of vectors spaces are to disjoint unions of sets.”\
Goated Sources:
- https://www.math.brown.edu/reschwar/M153/tensor.pdf
- https://people.math.harvard.edu/~elkies/M55a.10/tensor.pdf
- https://www.cin.ufpe.br/~jrsl/Books/Linear%20Algebra%20Done%20Right%20-%20Sheldon%20Axler.pdf
BIG BOY TIME
Lecture 32: 4/5 :Multi-Linear Functionals
The connection between group theory and Linear Algebra!
In order to truly appreciate the beauty ok multi-linear functionals, we must explore Group theory, and it is the study of group theory which introduces the building blocks of symmetry! Review : 410 Branch
Fancy Bilinear Transfomation Definition
Recall Using group theory, we can more concisely write this span in the following way!
MultiLinear Functional
Which describe all n-linear functions from , then Lets look at let Hence the basis for will be denoted as The dual basis :
By definition, N linear functionals is the same thing as
The det operation is Anti-symmetric
Anti-symmetry: a relation is antisymmetric if The determinant is anti-symmetric! What we basically did was swap
Concrete Example :
Week 13
Lecture 33: 4/8 : Decomposition of Bi-Linear Maps and Intro to K-Linear maps
(Lem)
Suppose we consider two linear maps such that (\Lambda B) (v_1, v_2) = \frac{1}{2}(B(v_1, v_2) + B(v_2, v_1))$$$$(\Lambda'B) (v_1, v_2) = \frac{1}{2}(B(v_1, v_2) - B(v_2, v_1)) These are known as Symmetrizers
(Lem) and
Proof 1) and give a basis for
Suppose that we pick a . Observe that hence
Suppose , then hence
Therefore,
Proof 2) Symmetrizers are projections is a projection of along L^{asym}(V^{\times2}; F)$$\Lambda' is a projection of along Find their Kernal and Images
Generalization : K-linear maps
Suppose we consider the following vector space :
-
,
- (Note, these are the same vector space, but with different bases)
-
Bases :
-
We will use this shorthand
Special Maps
Symmetric Maps , is symmetric if:
Let
Anti-Symmetric Maps (or Skew-Symmetric) , is Anti-Symmetric if:
Let
Alternating maps , is Alternating if:
Let
Lecture 34 : 4/10 Groups acting on Vector Spaces
More Defintions
Why do we need groups?
Because we can use groups to act on sets, which is helpful in counting the number of elements in a basis! A groups purpose in life is to act on things
Useful Properties :
- acts on ex) Let and
Prove defines a group action
A try :
F is antisymmetric if
- Problem! Too many permutations!
Another try!
More problematic than appears
look :
!! It works out!!!
“swap of changing letters can be done in different ways!”
Perform different out of a simple permutation
Perm = the parity of the number of the same is the same
Perm = different computations of a simple permutation
Consider a such that
Now suppose we consider acting on this using
remember one important fact about the symmetric group, their inverses!
In order for our equations to match up, we need to consider the following :
in order for the two to be equal, we must actually permute the vertices of the functionals
Now define the antisymmetric group (or alternating, however this terminology is outdated)
number of choices : n choose k
dim
Question :
Suppose we examine a finite field of 2 elements and we form a vector space of dimension 2 :
Examine the following :
Basis:
Lecture : 4/12
- Fix :
- =
because it is symmetric
k=2
Each
is symmetric!
proof :
Want :
NOTES : remember, the is an abelian group as it is isomorphic to
Therefore, the span is L.I., therefore it forms a basis!
Question : What are the dimensions!
Span =
combinations of combinatorions with repitions of k for out of dim V =
Segway into the Determinant!
Focus on
Let is determined up to a particular scalar is determined by
is that functional whose value , where is the famous epsilon function
Conventions :
look at the formulas on the right!
is a vector, is a functional denotes the 1st basis vector in v, denote the first linear functional of v, This is near as or which looks exactly like the dot product in a sinple way :
Week 14
Lec 36: 4/15
Determinant Properties!
:
Properties :
- det(A) Invertible
Cancellation Law of Group Theory!
Fact :
Let
E.R.O. V.S. Det(A)
if two rows are the same, in most fields except characteristic 2
Properties :
- Row swap :
-
- Why :
- This expression is nonzero
upper right triangle :
(4 2 1 1) ←> (3 1 1 1)
Determinants as expansions by minors of a row/a column
Recall, its linear in respect to the column!
A linear function :
or
question : What is the coeeficient?!
what are there existion marks
Adjoint of a matrix :
4 equations
Property!
- exists
- If A is a 0 divisor!
Consider or a field on 2 elements
number o functions : unique functions
Claim!
In all characteristics, In not characteristic 2, In Characteristic 2, In characteristic not 2,
Question 1) What is the total number of linear functions from
- , hence the dimension of all linear functions from is 2
- Claim 1: Every Symmetric Matrix is Antisymmetric
Number of symmetric : Only in characteristic not 2
Case 1 k = 1:
case 2 : k = 2:
case 3 : k = 3?><<dfsssss;‘x
In characteristic 2 :
for bilinear maps, consider the following :
functionals on their own are not bi-linear, so we have to multiply!
consider the following for a V.S. of dimension 3
is not bilinear, however, is not bilinear. just doesn’t make sense! So, the basis of consist of 9 elements, choosing 1 from the left and 1 from the right
Question : what linear combination of
Observation: Consider a vector v with elements , where each element is non-zero. then
But notice something : , so inorder to find its counterpart , we should also consider that is also a problem as
Lemma 1) : Proof : Therefore, we can construct this monomial such that
Note: If , then our linear combination is not linearly independent as , therefore will always be 0 Conclusion, we just permute both i and j!, we need cycle that must be length 2: Lets consider (as our vector space is 3 dimensional). and let , if we consider all options, of , we get the following :
e : (12) : (23) : (13) : : (132) :
From this example, there is only permutation in which granted use the element : (funily enough, its the ) Lemma 2)
The big thing we must consider is that while the vectorspaces have the same dimension, they might have different bases and thus different functionals!
Hence, we have witnessed that ! Its just a permutation of the indices!
Now consider the following :
ITS JUST acting on a set of n numbers, in our case, its
acting on
https://math.stackexchange.com/questions/242812/s-n-acting-transitively-on-1-2-dots-n
acting on =
acting on is
acting on is
acting on should have
- https://math.stackexchange.com/questions/3210062/whats-the-difference-between-the-following-nk-1-choose-k-nk-1-choosek
- https://math.stackexchange.com/questions/4716950/combinations-with-repetition-nr-1-choose-r-1-nr-1-choose-r?rq=1
Consider a vector space of dimension n over a field F. Let denote all k-linear maps from . Prove the dimension of or all symmetric k-linear maps is
Known Facts :
Lec 38: 4/18
The Jordan Normal Form of a Linear Map (Ch 6, 7)
Problem : Given a space V,
Goal : Classify Linear maps
Produce a small (Finite) list of maps such that any is equivalent to exactly 1 on the list
ex) We’ve seen an example
, such that
Classification of such that
such that must T such that Want to quit , any P, Q must
Marketing the problem precise :
Problem: CLassify matrices up to similarity, i.e. is equvalent to if
Ex)
If allowed, is equivalent to , where
Is that true
In general :
When
Now, if its a square matrix :
recall :
Fundamental result actually uses a neutering of the Jordan Normal Form
Hard problem : Simplification
Given : Q) What does it do? Idea : Find , such that is “Good”
Amazing Idea : “Good” means diagonal such that with a bunch of c_i in between Degrees of freedom are decoupled
Q) Is every matrix diagonizable? I.E. does there exist P for any T such that
Example : Basically symmetric matrix!
What does it mean?
Eigen-Vector
Given , is called an eigen vector if of eigen value c if and
T is digitizable if a basis of eigen vectors
Q) Is there atelast 1 eigenvector?
- Yes Iff has a non-zero Solution
eigenvalue characteristic eigenvector characteristic vector
Characteristic Polynomial
The characteristic polynomial of is
WE WANT EIGEN VALUES, so from now on, is algebraically closed
Let V be a vector space over a field F of dimension n. find the dimension of all k-linear maps :
Suppose n = 5, k = 3
BUT
Lec 39 : 4/24 : Jordan Normal Form of a Matrix
Recall : over F
diagonalizable
Experimental Material :
Not every linear map is diagonalizable :
- T : \Cmatrix{}{c & 1 & 0 & ... \\ 0 & c & 1 & 0 ...\\ \vdots \\ 0 & ... & c & 1 \\ 0 & ... & 0& c}
Ways to solve :
- Note :
\Cmatrix{}{c & 1 & 0 & ... \\ 0 & c & 1 & 0 ...\\ \vdots \\ 0 & ... & c & 1 \\ 0 & ... & 0& c} \iff there is a chain
but
Also :
- Doing a concrete example
\Cmatrix{}{2 & 1 & -1\\ 2 & 2 & -1\\ 2 & 2 & 0} : \C^3 \to C^3
From this, this means its not diagonalizable
eignevectors :
[T]_{\{\alpha_1, \alpha_2, \alpha_3\}} = \Cmatrix{}{1 & 0 & 0\\ 0 & 2 & 1\\ 0 & 0 & 2}
Fact : \ker(I-2Id)^2 = \Cmatrix{}{0 & 1\\ 0 & 0}^2 = \Cmatrix{}{0 & 0\\ 0 & 0}
B: The result :
(Def) Root space
The kernel : is called the root space. It is denoted as : Note :
- , if , then it means that it is diagonalizable!
- , we can also see that
- is a subspace!
(Lem) is a T-Invariant, i.e.
Proof
(Thm)
- For the restriction of to , each j, there is a basis of such that bunch of blocks in the matrix : add photo each block being of the form… (add more photos)
- The collection of sizes of blocks up to order, is independent of the basis!
Question : Are the sizes of the blocks dependent on the dimension of the root space?
Jordan Cell !
\Cmatrix{}{c_j & 1 & 0 & ... \\ 0 & c_j & 1 & 0 ...\\ \vdots \\ 0 & ... & c_j & 1 \\ 0 & ... & 0& c_j}
Suppose T is upper triangular, where the diagonals are denoted by , then determinant is
Now suppose its in the jordan normal form
sizes of all cells with on the diaganols
Cases and examples :
2 cases! \Cmatrix{}{0 & *\\ 0 & *}, \Cmatrix{}{c_1 & 1\\ 0 & c_1}